Inspection
Tilting at pressure vessels
12 September 2005At Bohunice, a range of measurement techniques have been used to monitor the geometry of a VVER-440 pressure vessel over a period of three years. By L’ubomír Ondris, Viktor Rusina, Ján Buzási, Marian Trutz, Marek Paskala, Stefan Lukác and Milos Skrabálek
The monitoring of the angle of a VVER-440 pressure vessel with respect to the concrete reactor shaft is necessary for operational and safety reasons and is required by technical directives. The tilt vector, measured in the reactor main jointing plane (MJP, the pressure vessel’s circular 3600mm flange) cannot exceed 1.5mm. The amplitude of the tilt vector is defined here as the maximal height difference between two points in the flange plane on the flange diameter basis of 3600mm. The angle of the tilt vector is given by the orientation of the line of maximal tilt lying in the flange plane relative to the reactor coordinate system.
The classical, authorised way to determine the tilt vector is to measure at 24 points on the flange plane, but this method can only be carried out while the reactor is shutdown. Two independent relative methods were incorporated to the authorised method. These are the hydro-levelling and pendametric methods. These methods are advantageous as they allow practically continuous measurement of tilt vector even during reactor operation.
Measuring methods
Precise levelling
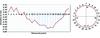
The tilt of reactor MJP is usually measured once each year during reactor shutdown. The normal method, called ‘precise levelling’, is carried out on 24 evenly spaced points every 15º around the perimeter of the pressure vessel’s circular flange. It involves measuring relative height differences at the points and the immediate calculation of the reactor tilt vector from this data (see Figure 1). This is also a part of the control measurement protocol.
In our measurements, we used a ZEISS Ni-002 geodetic level and a 1.8m invar levelling batten with pellet. Measuring precision was 0.05mm.
Hydro-levelling
This is a well known levelling method, and in connection with the application of optoelectronics and microprocessors has some advantages to purely optical methods. It uses a system of connected vessels made of optical glass. The liquid levels in individual vessels lie in one horizontal plane when certain physical conditions are fulfilled. This plane can then serve as the reference plane for the height differences between the individual points’ measurements. Vessel liquid levels are measured by optoelectronic method by means of the charged couple device sensors. A minimum of three hydro-levelling sensors are necessary in order to measure reactor shaft tilt vector.
Three hydro-levelling sensors developed and made in the Institute of Measurement of the Slovak Academy of Sciences were used, interconnected with hydraulic and pneumatic pipes and connected to a power supply and a controlling personal computer. The liquid temperature in sensors was measured by means of built in thermometers and this data was used to compensate for temperature dilatation.
The range of height difference measurement was ±10mm, with a precision of 0.01mm.
Pendametric method
The pendametric method uses the properties of a vertically damped pendulum. Its hinging point is connected to the measured object. The position of the pendulum wire is measured biaxially in a reference plane which is usually horizontal. The wire’s position in the reference plane and its length determines the reactor shaft tilt. The optoelectronic method is preferentially used for this position measurement rather than the hydro-levelling method. Such measurement unification simplifies the whole measuring system.
Although one biaxial pendametric sensor is sufficient for tilt vector measurement, our measuring system incorporated two pendametric sensors as purpose-built redundancy. Interconnection with a power supply and communication cables is common in hydro-levelling sensors.
The measuring range of the pendameter wire position was ±2mm in both coordinate axes; resolution was 0.001mm.
Positioning sensors
Topology of hydro-levelling and pendametric sensors on the outside perimeter of the circular reactor shaft is shown in Figure 2. The diameter of this shaft is 12m. Hydro-levelling sensors are extended by means of a compensatory vessel with a large liquid surface. Both hydro-levelling and pendametric sensors are fastened to the ferro-concrete reactor shaft with special rods without damaging the reactor’s hermetic zone.
The original software of the controlling computer made it possible to change the periodicity of measurement and evaluate measured data. Hourly, daily, weekly and monthly average
values of measured data can be also recorded. Periodicity of measurement was set to five minutes. The software also enabled the team to correct the measured data by comparing it with actual data collected using the precise levelling method, giving the absolute reactor tilt.
The control computer’s software also opened up the possibility to view the reactor tilt vector measurments in the form of a polar graph, giving a time sequence of tilt vector end points. It would also be possible to view a linear time sequence of the amplitude and angle of the tilt vector for both measured and computed data in table form.
Results
Graphical presentation of tilt vector time dependence in polar graph form contains linear time dependence for both components of tilt vector separately. Control software allows the values of tilt vector amplitude and angle to be obtained in numerical form by clicking on the linear graph according to the measurement date.
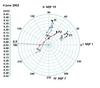
Results for all three methods of tilt vector measurement for periods of reactor shutdown are presented in Figures 3, 4 and 5. Measured data obtained by all three methods are in these graphs uncorrected with respect to data measured by the absolute precise levelling method. The ranges of the graphs are smaller than the sensors’ measuring range for reasons of legibility. The angle of tilt vector measured by the precise levelling method is shown by the thick line and its amplitude is given numerically out of the graph circle. Numbers connected by lines represent measurements taken every five days on a global time sequence. The small triangles on the hydro-levelling and pendametric measurements represent values measured simultaneously with the precise levelling measurement.
Analysis
The first fact to note, which arises from the polar graph in Figure 3 is the considerably different amplitude and angle of tilt vector measured by the absolute precise levelling method compared to the results measured by relative methods. This is a natural consequence of initialising the relative measurements at near zero amplitude to make the best use of the sensors’ ranges.
The second fact is the equal tendency of both tilt vector components in the hydro-levelling and pendametry time sequences. But the different velocity of tilt vector changes in equal time intervals is presently not well understood.
A significant fact is the repeatability of measured tilt. Comparison of graphs from Figures 3, 4 and 5, which give the same quantities but were measured one and two years later demonstrates this.
It is very important that the reactor tilt during shutdown periods is not identical to that during operation. It is caused mainly by the different temperature of the reactor and neighbouring parts of the power plant building under the two conditions.
Reactor tilt values obtained by the individual methods is several tenths of millimetres. This could be critical near the maximum tilt value (1.5mm) allowed by technical regulations.
The results reached by the precise levelling method do not determine the real position of the reactor body under operating conditions. It is only possible to find this through the correction of data measured by the relative methods according to the precise levelling method data measured at the same time.
Information about object deformation processes can be reached by the periodic or continual diagnostics of the reactor construction. This information creates the basis for:
• Appraisal of the reactor and its interaction with its surroundings.
• Comparison of the actual tilt with theoretical values.
• Correct operation of the reactor and safety evaluation.
From the point of view of the safe and trouble-free operation of power plant reactors, it is necessary to perform continual checks on the geometry
of the reactor and take action before the reactor could move beyond proscribed limits.
Information on the dynamic behaviour of a ferro-concrete reactor shaft as a structural part of the nuclear power plant under different thermal conditions is very valuable. The results of these measurements can be widely used, not only for appraising supporting constructions, but also to develop predictions of future tilting and to help prolong the lifespan of a plant.
Author Info:
L’ubomír Ondris, Viktor Rusina, Ján Buzási, Marian Trutz, Marek Paskala, Slovak Academy of Sciences, Dúbravská cesta 9, Bratislava, Slovak Republic; Stefan Lukác, Slovak University of Technology, Radlinského 11, Bratislava, Slovak Republic; Milos Skrabálek, Jaslovské Bohunice, Jaslovské Bohunice, Slovak Republic
TablesFigure 1. Data produce by the precise levelling method